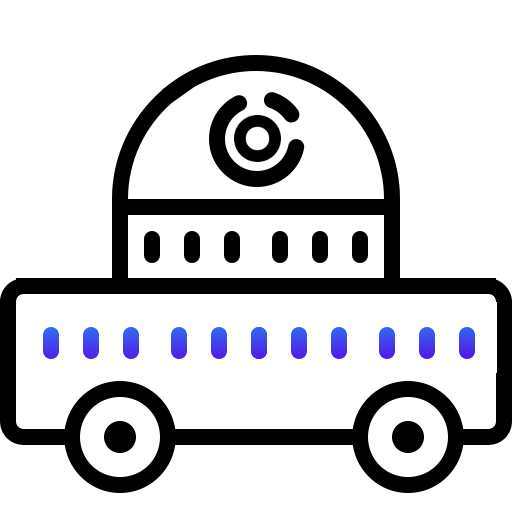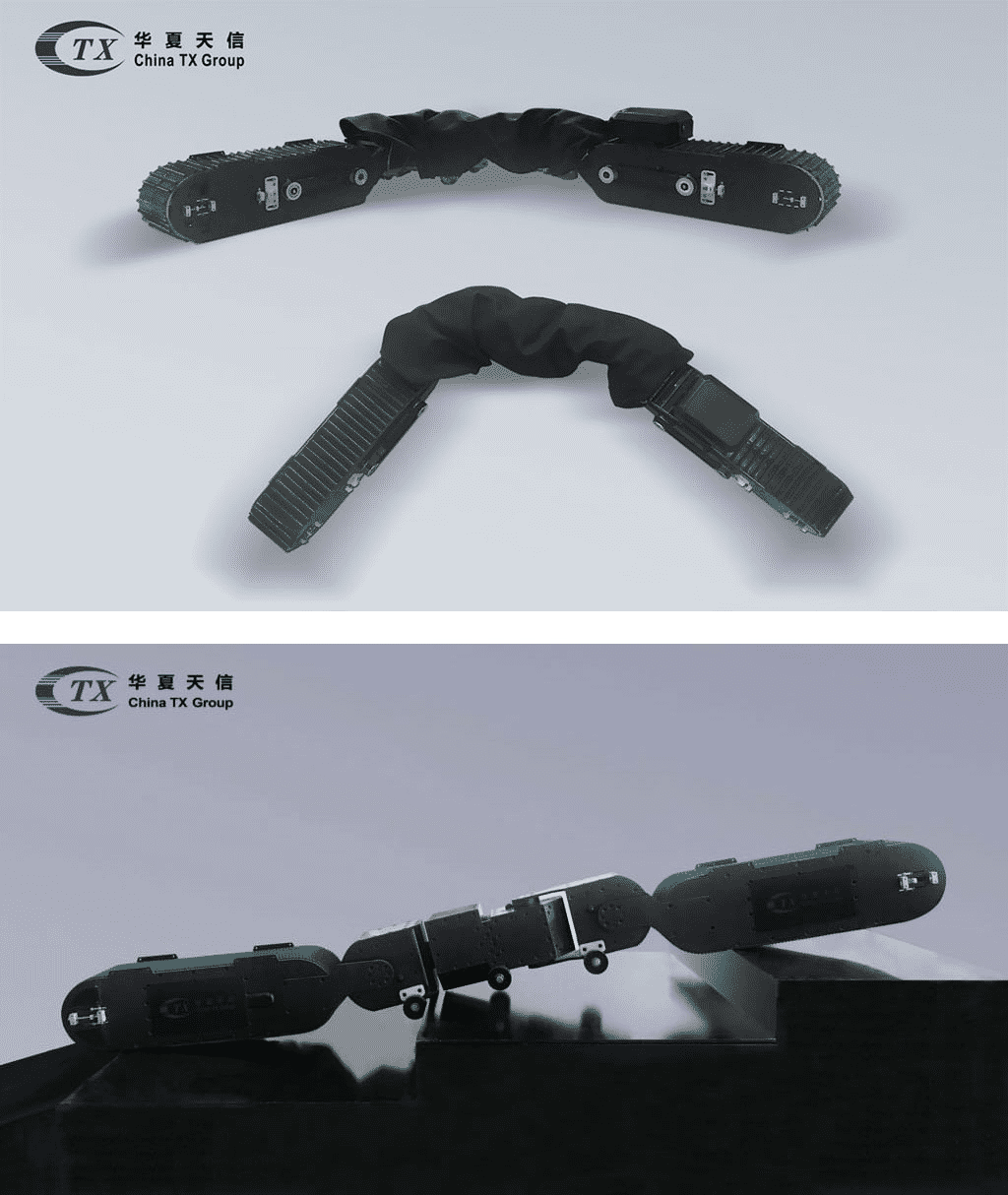
应急救援蛇形机器人是一款多功能、便携式、无线控制的无人化爬行设备,专为进入不可预测与结构不明的恶劣环境所设计
可实现蜿蜒前行、后退、钻洞、越障、爬坡、抬头、摆头、攀爬等功能;可做为移动的物联网终端,携带多种传感设备(如瓦斯、温度、视觉、通信分站等),实现将信息传到远离危险环境的 RED-IOT® 操作系统平台;专为安全及救援系统设计,可长时间及远距离工作;带有组合式高清摄像头及红外成像仪,可多角度视觉观测;可无线控制,为远程检测提供安全保障。矿用型机器人通过煤矿本质安全认证,支持扩展功能


轨道式矿用巡检机器人主要由移动巡检平台、无线通讯系统、组合式信号采集设备和轨道系统组成,适用于城市综合管廊、电缆管廊、大型输送带、巷道移动巡检、配电室等。轨道式矿用巡检机器人采用了先进无线数传等技术,实现了机器人在轨道手动或自动控制运行,对整个轨迹内的声音、图像、气体等参数的实时采集、回传,并将采集的数据融入智慧矿山操作系统平台(RED-MOS®)进行大数据分析,为用户下一步的分析和决策提供关键依据
轨道式矿用巡检机器人主要由移动巡检平台、无线通讯系统、各种信号采集设备和轨道系统组成,适用于城市综合管廊、电缆管廊、矿山水泵房、变电所、大型输送带巷道移动巡检
矿用轨道巡检机器人采用了先进无线数传等技术,实现了机器人在轨道自动或手动控制运行,对整个轨迹内的声音、图像、气体等参数的实时采集、回传、存储及分析